Fantasma Robot per Halloween
Si muove in modo casuale restando appeso ad un filo, suona una sequenza di note e s'illumina.
Arduino
Questo ed altri progetti sono stati realizzati impiegando un microcontrollore Atmel ATMega 328, programmato mediante la piattaforma di sviluppo Arduino.
Vi rimando al sito di Arduino per qualsiasi altra informazione, ma se non avete
mai sentito parlare di questa piattaforma, in sintesi, si tratta di un microcontrollore
Atmel ATMegda 168 o 328, programmabile in linguaggio C via USB, che può gestire fino a 14 porte
digitali configurabili come ingresso o uscita e fino a 6 ingressi analogici, rendendo
disponibili fino a 32KB di Flash Memory, 2KB di Ram e 1KB di Eeprom.
Non occorre utilizzare la piattaforma completa per ogni circuito realizzato,
infatti, una volta programmato il microcontrollore, questi può funzionare in modo autonomo utilizzando
solo un quarzo da 16MHz e due condensatori da 22-33pF.
Su diversi siti italiani sono disponibili microcontrollori Atmel ATMega 328 già programmati
con il bootloader Arduino 2009 o Arduino Uno, adatti allo scopo, con un costo tra i 5 e gli 8 euro circa.
Inoltre, in rete sono disponibili informazioni per la programmazione di ATMega 328 vergini (che hanno un
costo inferiore) in modo che possano essere utilizzati con la piattaforma Arduino.
I circuiti presentati funzionano perfettamente anche con la nuova piattaforma
Arduino Uno.
Per qualsiasi informazione non esitate a contattarmi.
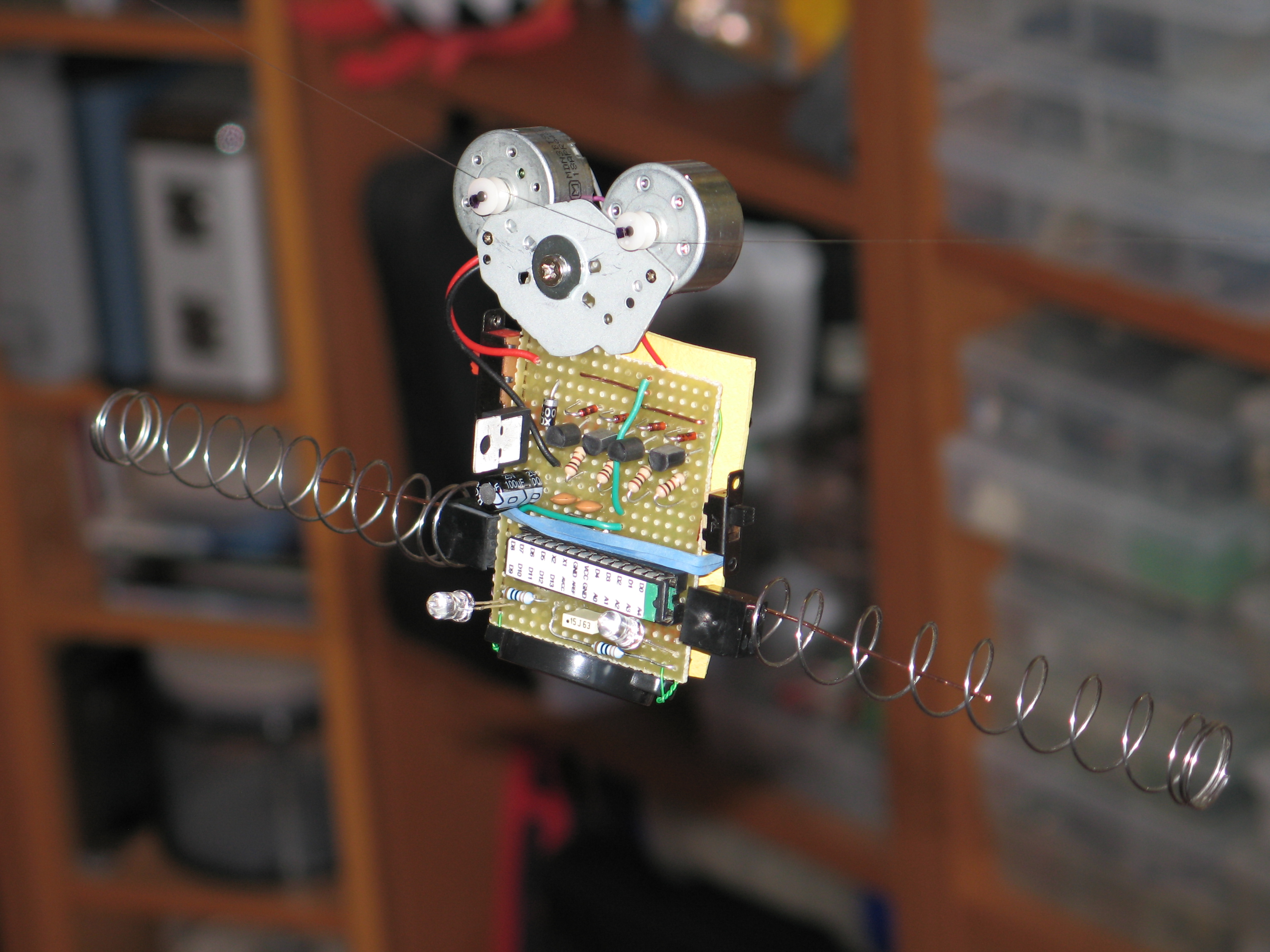
Vista del robot appeso ad un filo (1/2) |
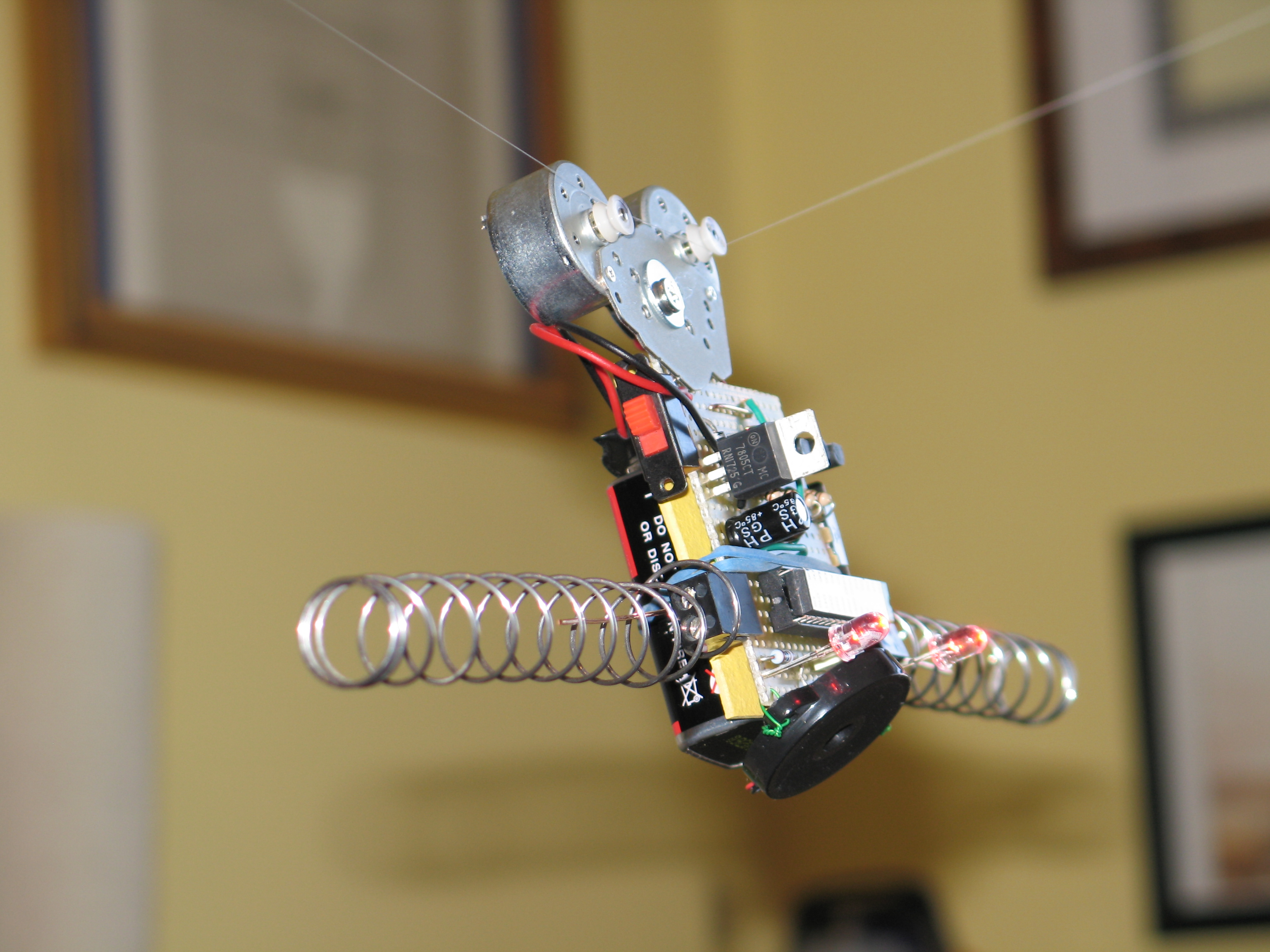
Vista del robot appeso ad un filo (2/2) |
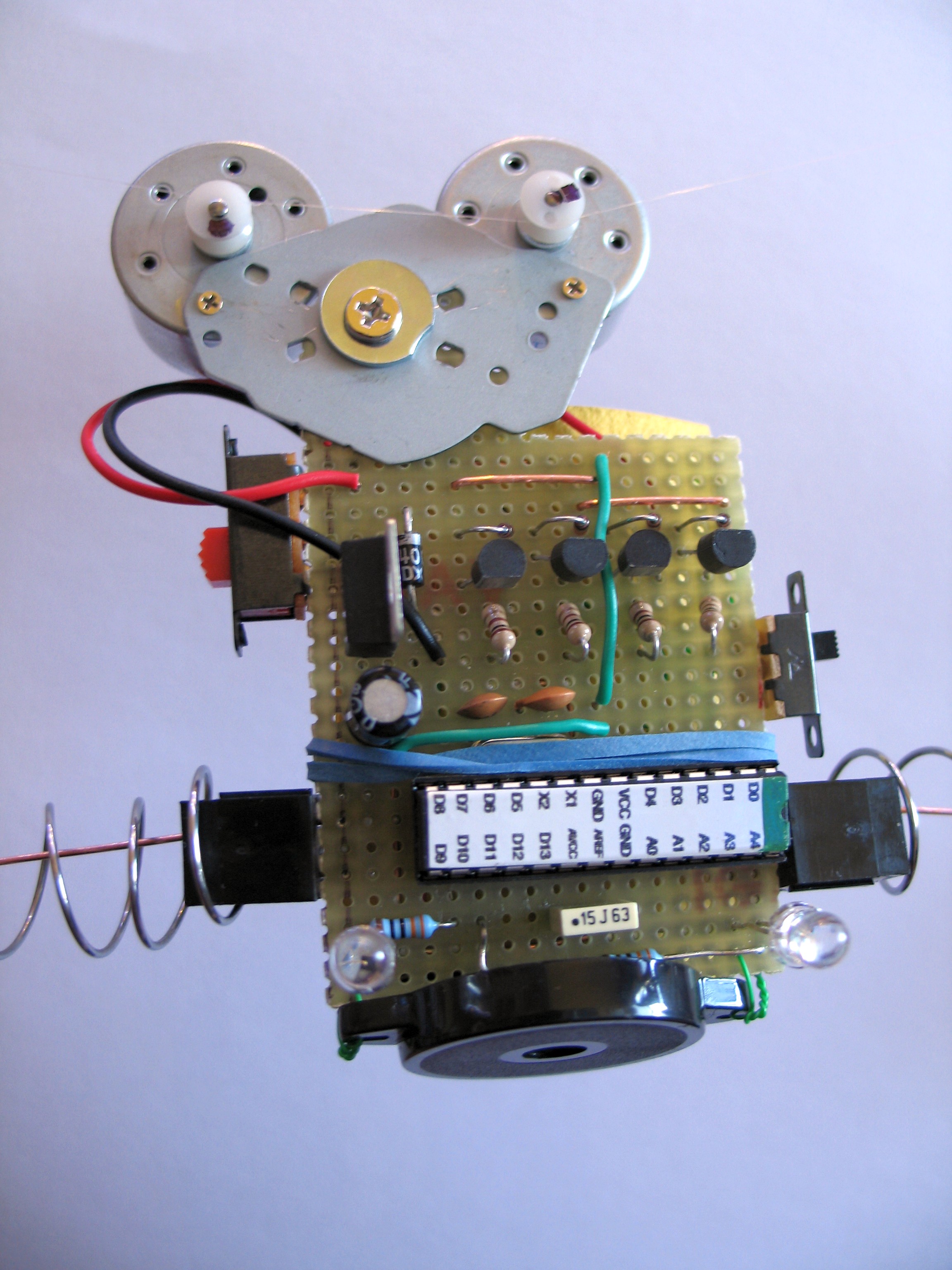
Vista del circuito del robot |

Vista del circuito "vestito" |
Aggiornamenti e download
24.10.2011 : Versione 1.0 : Realizzazione e collaudo.
 Schema Elettrico (.PDF - 202 Kbyte)
Schema Elettrico (.PDF - 202 Kbyte) 
Circuito stampato - Vista complessiva (.PDF - 197 Kbyte)
Circuito stampato - Lato Componenti (.PDF - 181 Kbyte)
Circuito stampato - Lato Rame (.PDF - 165 Kbyte)
Sorgente per Arduino (.PDE - 6 Kbyte) 
Semplice da realizzare e di sicuro effetto
Questo simpatico gadget è programmato per muoversi casualmente a destra o a sinistra, per un tempo casuale, con una velocità casuale. Se, in tutta questa casualità, il tempo di movimento supera la vecocità di movimento, il microcontrollore suonerà una piccola melodia.
Durante il movimento i led rossi verranno fatti lampeggiare e se il circuito dovesse entrare in contatto con un ostacolo, i contatti "a molla" faranno sì che la direzione di movimento si inverta. I contatti a molla possono essere realizzati in qualsiasi modo, l'importante è che, in caso di collisione, il contatto collegato al pin TOCCO del microcontrollore venga chiuso verso massa. Quindi, si possono usare pulsanti, lamelle o qualsiasi altro sistema idoneo.
Il circuito può essere realizzato rapidamente anche utilizzando una piastra millefori. I motori impiegati sono quelli utilizzati nei lettori CD/DVD per computer per l'apertura e la chiusura del cassetto porta CD/DVD. Funzionano a 12V, ma forniscono sufficiente coppia anche quando sono alimentati a 5V.
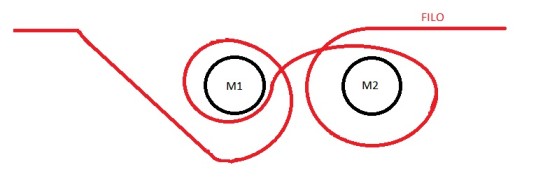
Il gadget andrà appeso ad un filo da pesca di diametro 0,15mm che ha una portata massima di 1,7Kg, quindi più che sufficiente per lo scopo, e si inserisce perfettamente nella scanalatura della puleggia dei motori. Un diametro maggiore permetterà di limitare l'oscillazione del filo, ma potrebbe non permettere una buona scorrevolezza delle pulegge nel filo. Buoni risultati si ottengono anche con un filo di 0,40 mm di diametro, ma molto dipende anche dalla tipologia dei motori impiegati.
Attenzione al verso di scorrimento: i motori devono essere collegati in anti-serie (vedere schema elettrico) in modo che quando attivati ruotino l'uno nel verso opposto dell'altro. Questo perchè il filo che passa tra le loro pulegge va avvolto in modo opposto sulle stesse. Scegliendo un diverso sistema di vincolo dei motori, potrebbe essere necessario collegarli diversamente.
Vi consiglio vivamente, comunque, di non collegarli in parallelo, per evitare l'effetto "differenziale bloccato", cioè per evitare che un eccessivo sovraccarico su un motore impedisca all'altro di girare. Invece, collegandoli in serie, il blocco di un motore non fa altro che scaricare tutta la corrente che passa, in ogni caso, attraverso tale motore bloccato, sull'altro adiacente.
Collegando i motori a delle ruote e cambiando la forma dell'oggetto, potrete realizzare un gadget semovente,
forse ancora più inquietante! Cliccando QUI potrete vedere una dimostrazione di funzionamento del gadget.
Funzionamento e schema elettrico
Il circuito viene alimentato con una comune pila "transistor" da 9V, ma può essere alimentato con una tensione continua tra 7 e 15 volt, vista la presenza del regolatore 7805. Il ciclo di funzionamento, avviato dopo l'accensione del circuito, è continuo e prevede che i motori vengano mossi in modo casuale in una delle due direzioni.
Il tempo di movimento, la velocità e la pausa tra gli spostamenti sono casuali. Chiudendo l'interruttore sul contatto VELOCE del microcontrollore la pausa massima tra gli spostamenti viene ridotta da 30 secondi a 5 secondi. Tali valori sono liberamente modificabili agendo sul programma di gestione del circuito.
Per l'attivazione dei motori viene usata una configurazione a ponte "ad H" in cui solo una coppia di transistor alla volta viene attivata per pilotare i motori stessi. Ad esempio per il movimento verso sinistra vengono attivati i transistor TR2 e TR3, mentre per il movimento verso destra vengono attivati i transistor TR1 e TR4.
Per modificare la velocità di movimento, i transistor TR2 e TR4 vengono attivati in modalità PWM, in modo da garantire sufficiente coppia ai motori, limitandone però la velocità entro un range programmabile. I transistor scelti, dei comuni BC337, possono sopportare una corrente di 800mA, quindi evitate di utilizzare motori eccessivamente avidi di corrente.
Il progetto è distribuito in modo gratuito.